CuteCOL is mijn eigen framework om verkeersregelingen mee te schrijven. CuteCOL is niet bedoeld voor echte verkeersregelinstallaties, maar is gemaakt om oude bedieningspanelen aan te sturen met een Arduino. Kunst met VRI’s!
CuteCOL is echter meer dan een framework om verkeerslichtenregelingen mee te schrijven. In CuteCOL zit namelijk ook een redelijk uitgebreide methode om verkeer te simuleren. Het verkeer (zowel voetgangers, fietsers als auto’s) reageert op de verkeerslichten en activeert de detectoren die in de gesimuleerde rijstroken liggen. Zo ontstaat er een cirkel waardoor het lijkt alsof het bedieningspaneel nog onderdeel uitmaakt van een werkende verkeersregelinstallatie. Zonder verkeer zou het maar een saai paneel worden!
– het simulatie deel simuleert verkeer waarop de detectoren reageren
– de verkeerslichtenregeling reageert op de detectoren en stuurt richtingen naar groen, houdt het groen vast of beëindigt het groen
– het gesimuleerde verkeer reageert op de verkeerslichten en gaat rijden bij groen en stopt bij geel of rood
CuteCOL is erg efficiënt opgebouwd, het hele programma (verkeerssimulatie, verkeerslichtenregeling en terminal programma) heeft minder dan 2 kilobyte geheugen nodig en kan meer dan 100 keer per seconde doorlopen worden in een eenvoudige Arduino Nano. Een realtime klok met oplaadbare knoopcel houdt de actuele datum en tijd bij en zorgt ervoor dat het regelprogramma 10 keer per seconde doorlopen wordt.. De verkeerssimulatie heeft voor ieder uur van de dag (werkdagen en weekend verschillend) intensiteiten opgeslagen. Zo is het ’s nachts dus rustiger op het kruispunt en is het in de spitsen erg druk.
Het volgende bedienpaneel heb ik onlangs nieuw leven ingeblazen. Dit specifieke paneel was verouderd doordat het kruispunt is uitgebreid met extra lusdetectoren en drukknoppen met het doel de regeling flexibeler te maken.
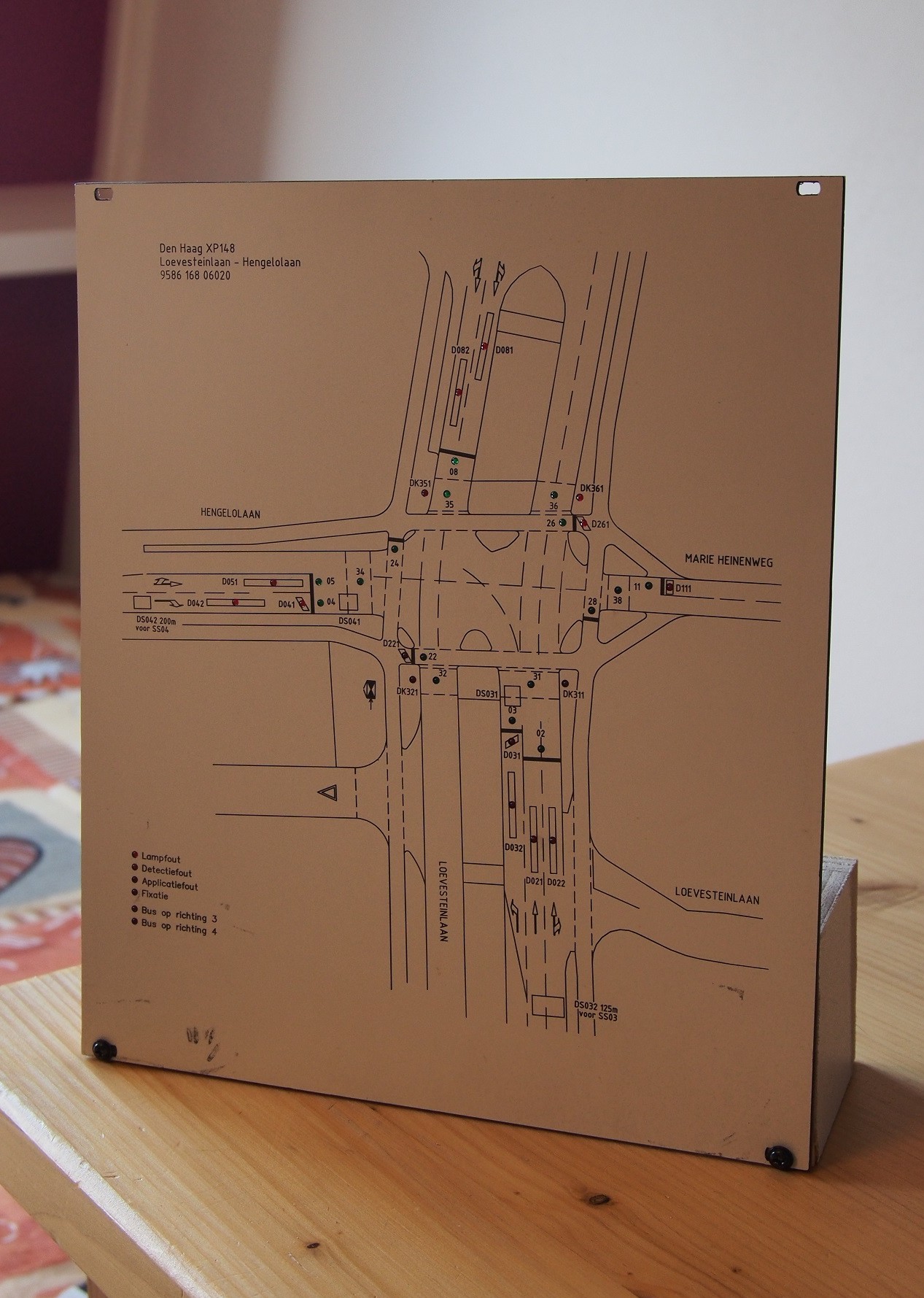
Bedienpaneel uit een oude verkeersregelinstallatie.
Eerst is er een nieuwe CuteCOL regeling gemaakt voor dit kruispunt. De code kan zowel voor Windows als voor de Arduino omgeving worden gecompileerd. Het verschil tussen de PC-omgeving en de Arduino-omgeving zit alleen in de IO-functies. Het is zo erg makkelijk om de verkeersregeling eerst uit te testen op de PC, voordat deze geplaatst wordt in de Arduino. De regeling functioneert vrijwel hetzelfde als een echte CCOL regeling : er zijn vastgroentijden, verlenggroentijden (afhankelijk van de periode), ontruimingstijden, een module-structuur, meetkriterium, aanvragen, nalopen, schakelaars, parameter, timers en hulpelementen. Richtingen kunnen ook meeverlengen met andere richtingen.
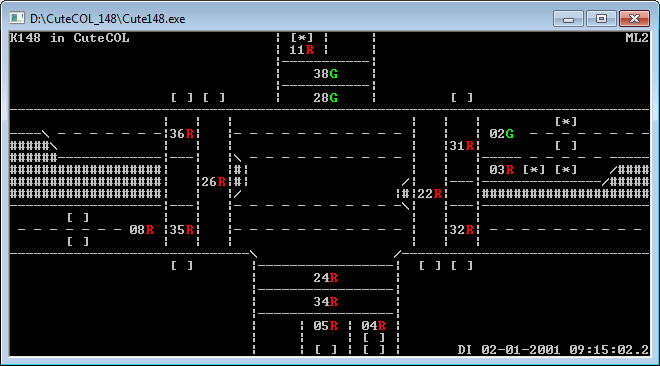
CuteCOL regeling op de PC.
Als de regeling eenmaal goed werkt op de PC, is het tijd om de elektronika op te bouwen. De basis is een Arduino Nano op een extra printplaat die zorgt draagt voor de IO : het aansturen van alle LED’s, het bijhouden van de tijd (via een realtime klok met een oplaadbare knoopcel) en het meten van de temperatuur. (Als u uw eigen bedienpaneel weer nieuw leven wil geven is dat mogelijk : er zijn een aantal printplaten te koop!)
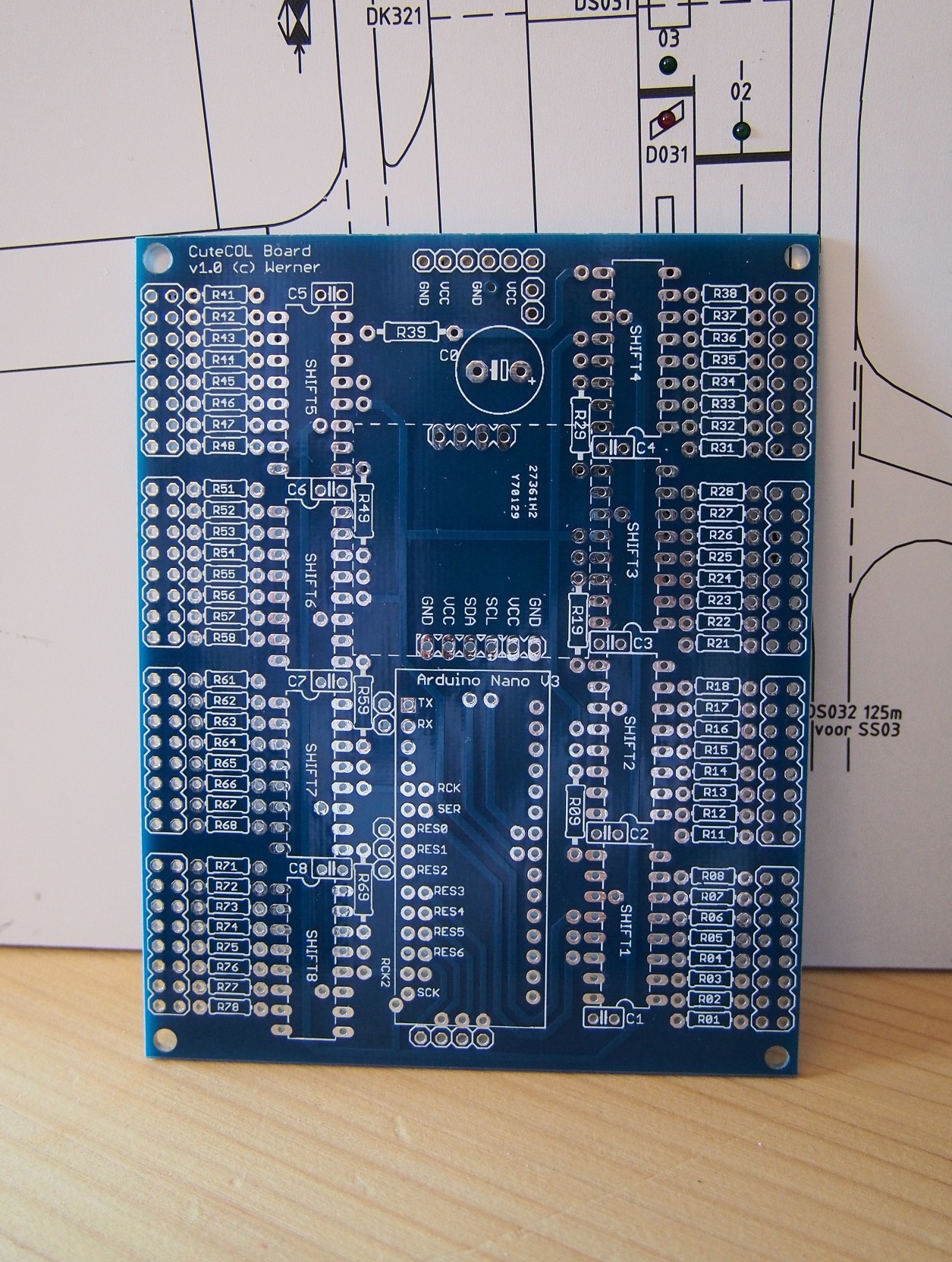
Printplaat voor alle elektronika.
Na het solderen van alle componenten op de printplaat en het aansluiten van alle LED’s begint het ergens op te lijken! De printplaat zit met dubbelzijdig tape vast aan de achterkant van het bedienpaneel. Dit type bedienpaneel heeft makkelijke aansluitingen om de LED’s mee aan te kunnen sturen, de LED’s worden met een paar eenvoudige kabeltjes verbonden met de elektronika.
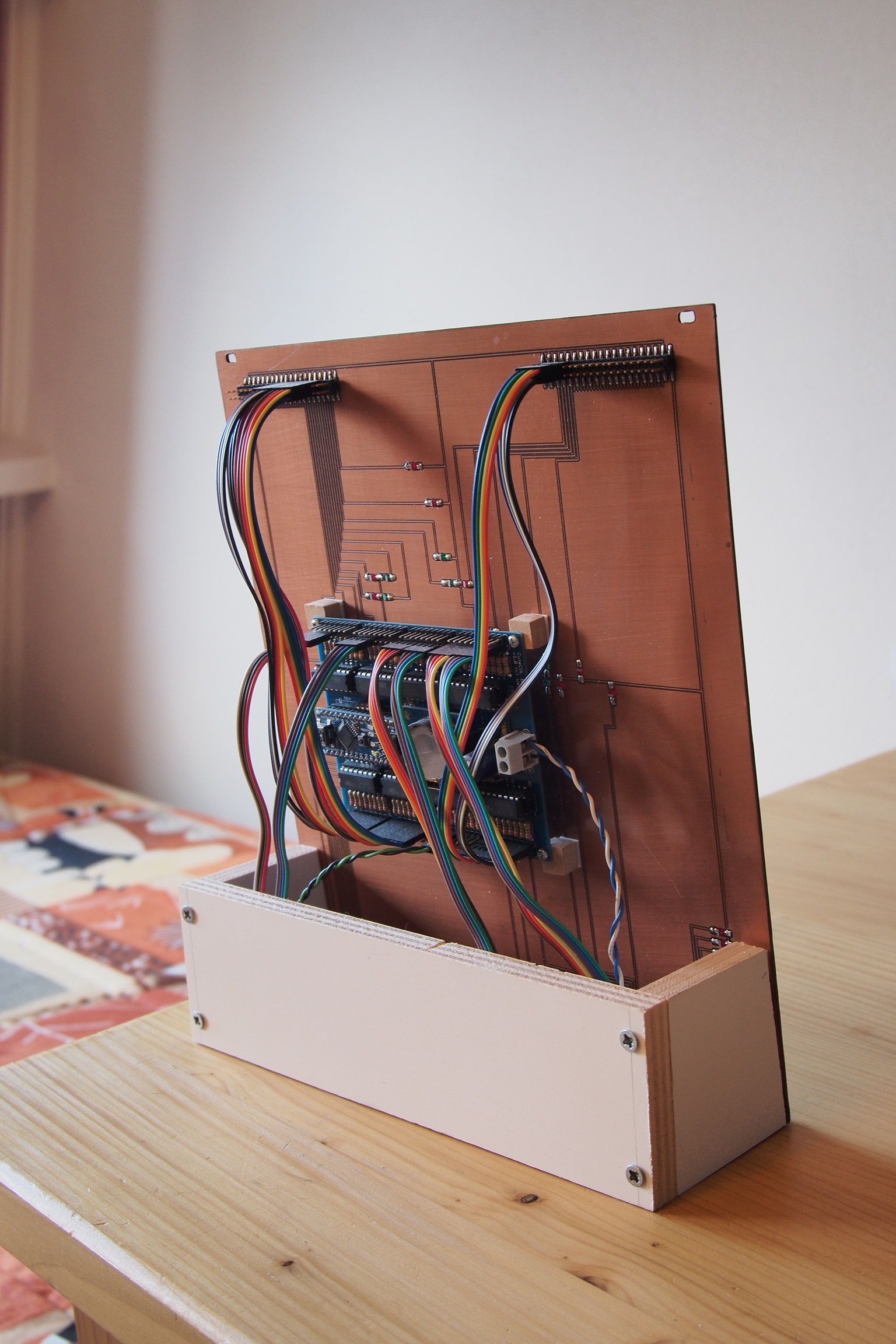
Elektronika aangesloten op het bedienpaneel.
Hierna kan de regeling in de Arduino worden geladen via een USB aansluiting en kan de verkeerssimulatie en de verkeersregeling in de Arduino worden opgestart. De USB-kabel wordt hierna alleen nog maar gebruikt als voedingskabel, maar het is ook mogelijk om via een seriële terminal een aantal instellingen van de verkeersregeling te wijzigen.